移动操作与工位适配
支持围绕实验台、样本架和检测设备建立稳定工作位,适合小批量试点和流程验证。
实验室自动化
围绕实验室中的样本、试管、料架和设备工位操作,云相将移动、定位、识别、抓取与流程配置组合为可验证的自动化平台。

工作流
内容聚焦可公开展示的通用能力和工作流,便于合作伙伴评估实验室自动化试点路径。
完成实验室环境地图、充电点、工作位和设备工位设置。
采集观察位姿,建立样本瓶、试管和料架等对象识别流程。
围绕目标对象完成视觉引导抓取、转移和放置验证。
根据合作伙伴系统接口和实验任务进行二次开发与交付适配。
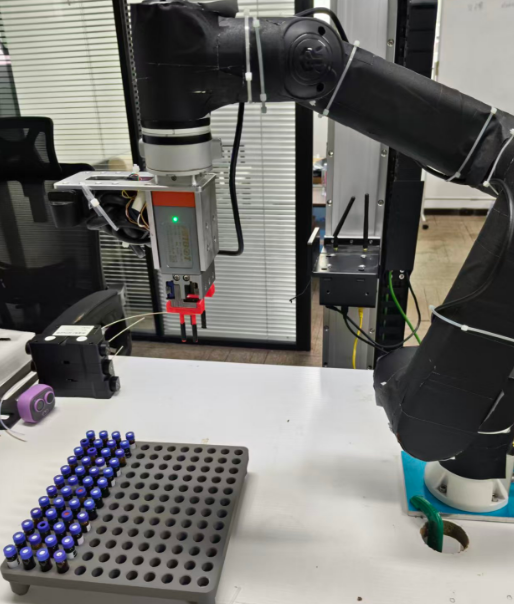
支持围绕实验台、样本架和检测设备建立稳定工作位,适合小批量试点和流程验证。
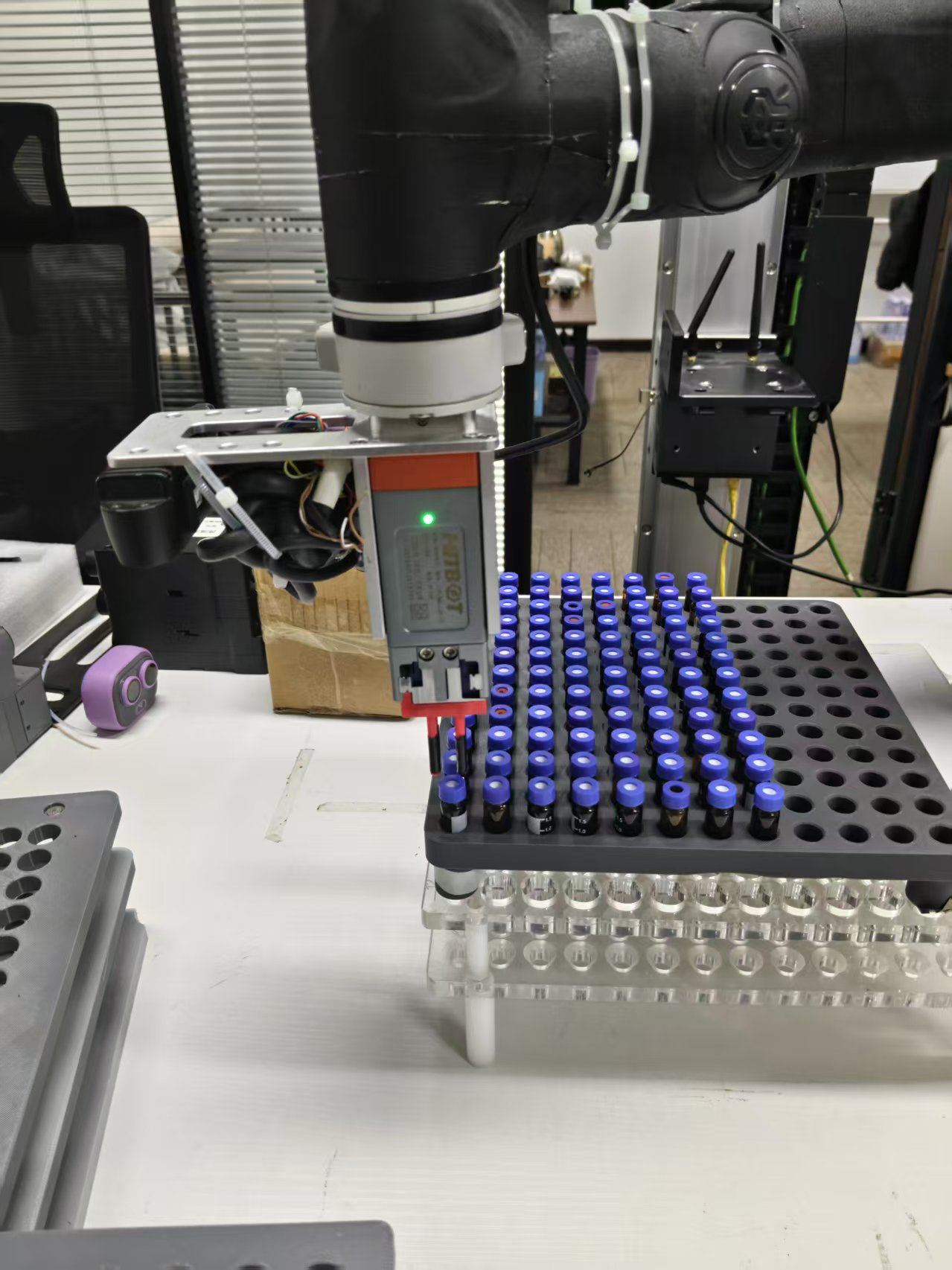
面向样本瓶、试管和多孔料架,验证机器人在实验室对象上的识别、抓取和转移动作。
试点适配