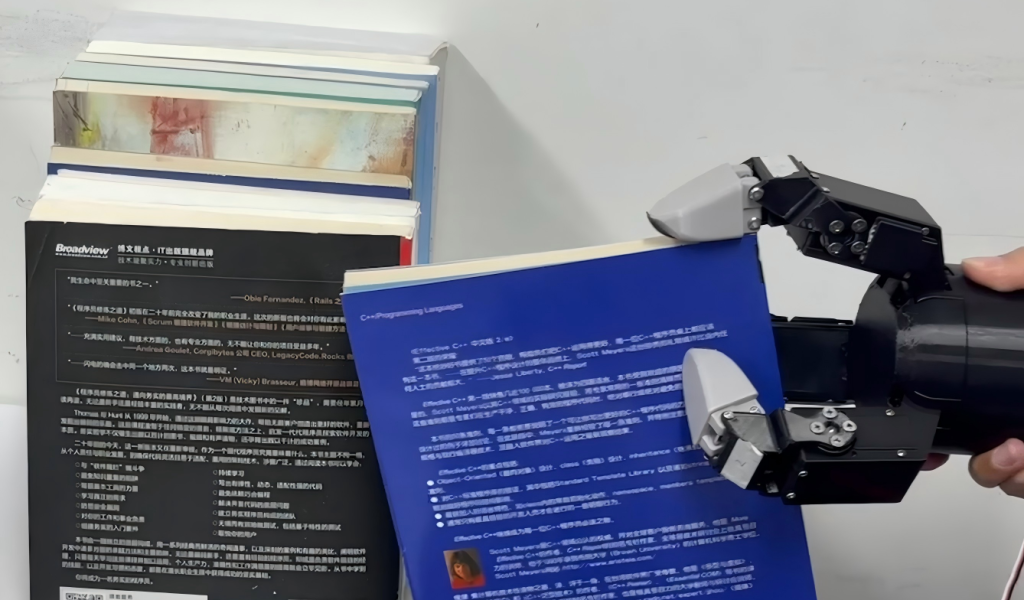
多对象操作能力
适配不同形态、材质和摆放状态的对象,面向科研、教育和柔性生产场景进行验证。
价值说明
传统机械臂夹爪通常需要额外安装视觉、触觉传感器并进行复杂标定。云相智能手把关键能力预先组合,帮助合作伙伴更快完成产品化验证。
面向主流机械臂和系统集成流程,降低装配和调试门槛。
减少视觉、触觉和执行器之间的坐标系与参数配置工作。
一体化设计减少多模块拼装带来的连接、干扰和维护问题。
适配不同形态、材质和摆放状态的对象,面向科研、教育和柔性生产场景进行验证。
参考参数
| 产品定位 | 机器人末端多模态执行器 |
|---|---|
| 核心模态 | 视觉感知、触觉反馈、夹持执行、力位混合控制 |
| 典型能力 | 强劲夹持、实时视觉、精细力控、预标定与快速部署 |
| 适用合作伙伴 | 机器人本体厂商、系统集成商、科研平台团队、自动化方案商 |