Mobile manipulation and workstation fit
Supports stable work positions around benches, sample racks, and testing instruments for small-batch pilots and workflow validation.
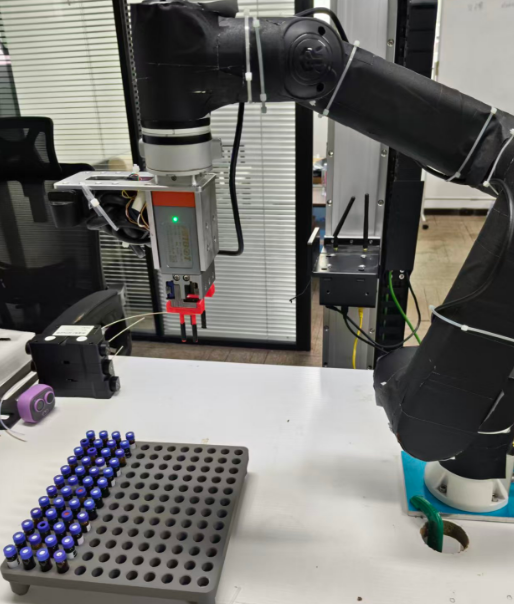
Laboratory Automation
YXT combines mobility, localization, recognition, grasping, and workflow configuration for samples, tubes, racks, and instrument positions in laboratories.

Workflow
This page presents publicly shareable capabilities and workflows to help partners evaluate laboratory automation pilots.
Configure laboratory maps, charging points, workstations, and instrument positions.
Collect observation poses and build recognition flows for sample bottles, tubes, and racks.
Validate vision-guided grasping, transfer, and placement around target objects.
Adapt workflows to partner system interfaces and task requirements.
Supports stable work positions around benches, sample racks, and testing instruments for small-batch pilots and workflow validation.
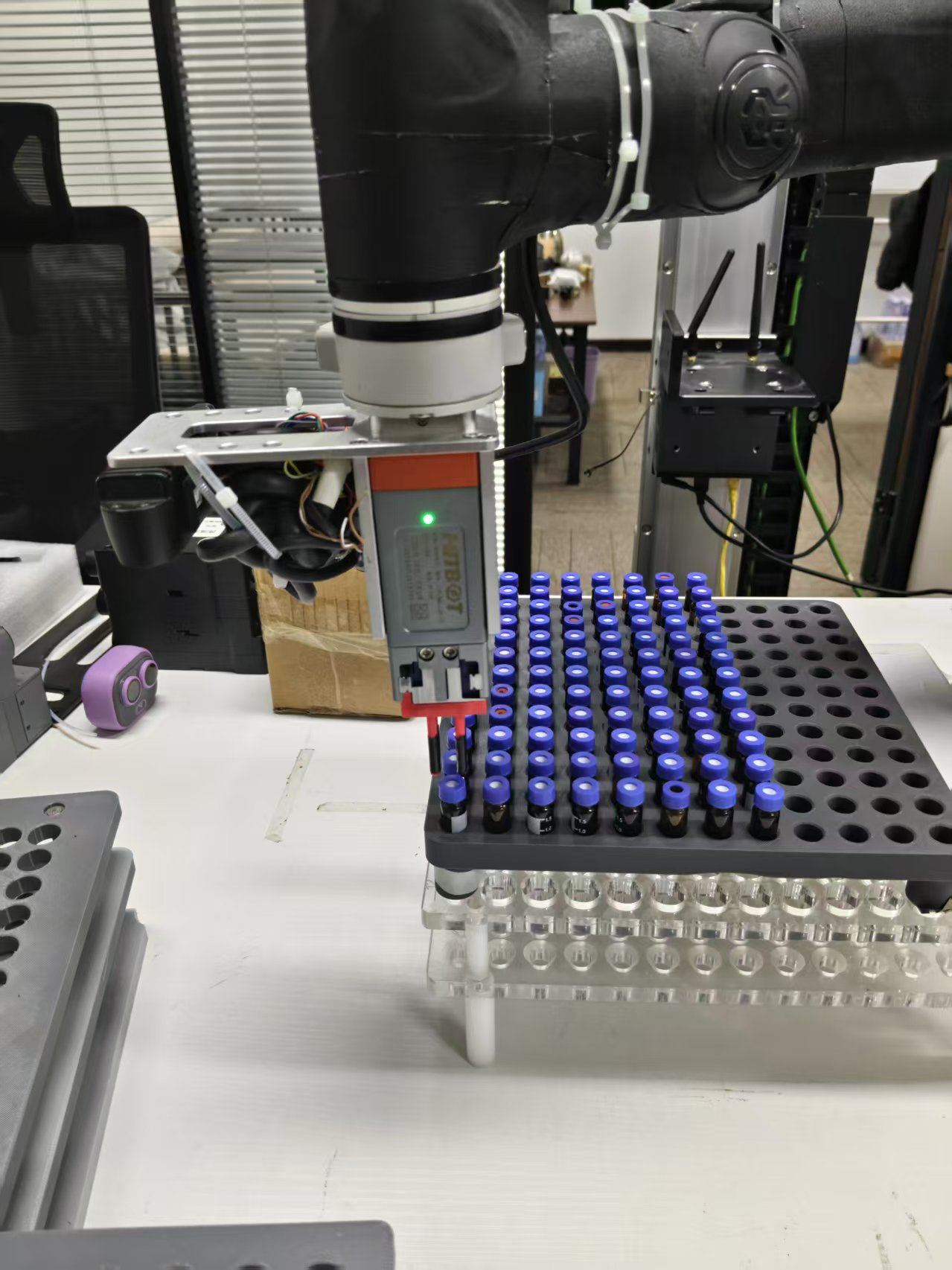
Validates recognition, grasping, and transfer actions for sample bottles, tubes, and multi-position racks.
Pilot Fit