Multi-object manipulation
Validated across objects with different shapes, materials, and poses for research, education, and flexible production scenarios.
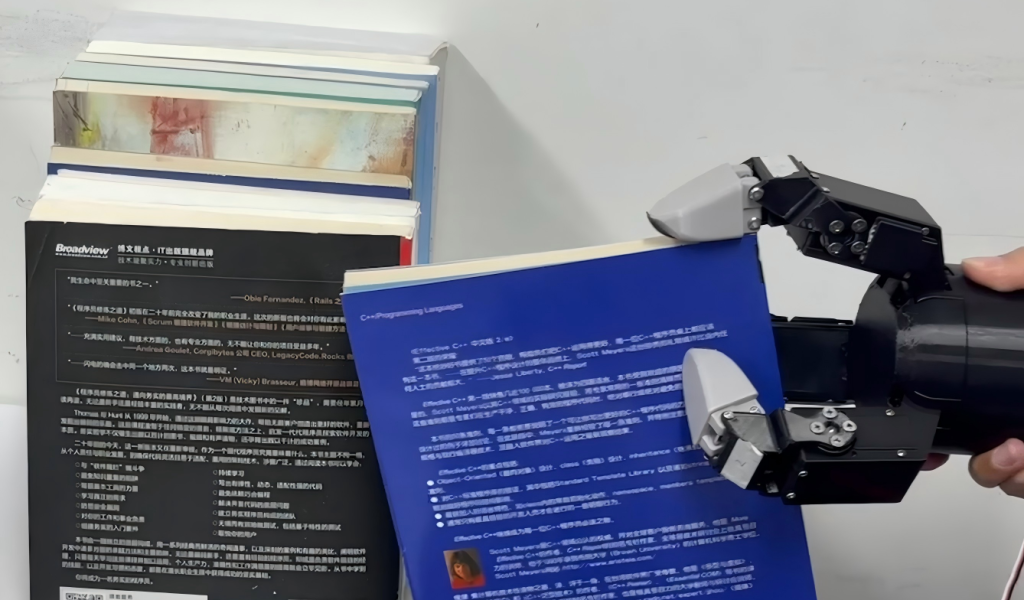
Smart Hand
YXT combines vision, tactile sensing, and end-effector actuation to give robot manufacturers and integration partners a deployment-ready manipulation capability for real objects.
Why It Matters
Traditional robot grippers often require external vision sensors, tactile sensors, calibration, and custom tuning. YXT smart hands combine these capabilities in advance to accelerate product validation.
Designed around mainstream robotic arms and integration processes to lower assembly and tuning barriers.
Reduces coordinate-frame and parameter work between vision, tactile sensing, and actuation.
Integrated design reduces connection, interference, and maintenance issues from multi-module assembly.
Validated across objects with different shapes, materials, and poses for research, education, and flexible production scenarios.
Reference Specs
| Positioning | Multimodal robotic end-effector |
|---|---|
| Core modalities | Vision sensing, tactile feedback, gripping actuation, force-position control |
| Typical capabilities | Strong gripping, real-time vision, precise force control, ready-to-use calibration |
| Partner fit | Robot manufacturers, system integrators, research platform teams, automation solution providers |